Did JEPA Learn Anything?
• 2 min read 2 min
What I worked on
Trained a JEPA model based on my environment and transition dataset. Now I need to validate that it’s actually learned the environment dynamics. The feature set (n=4) and action space (n=3) is small so here’s what I’ve landed on.
- Prediction Test
- Run on a fresh set of transitions
- Compare predicted next state to actual
- Compute errors separately for each feature
- Compare against two baselines: “do nothing” & a tiny model that learns the next state
Thinking: If it beats the first baseline and gets close to the supervised one then it’s learnt something
- Action Table
- For each action (noop, eat, forward) look at what the model predicts will change
- NOOP should decrease energy, eat should increase energy, forward should increase x_pos
Thinking: If these don’t align then the model isn’t using the action info correctly
- Latent Memory
- Small feature set means there should be a correlation with a latent dimension
Thinking: If there’s no correlation with any latent dim then the model probably dropped it
- VicReg Check
- no latent dim has near zero variation
- latent dims aren’t copy of each other
Thinking: first time using it so following best practices here to check it didn’t collapse
What I noticed
- Some of these rely on the decoder so it may need its own sanity check
”Aha” Moment
n/a
What still feels messy
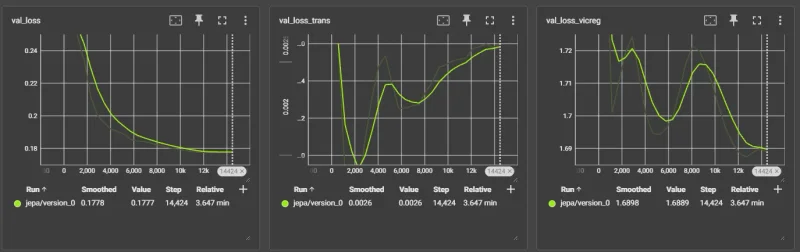
- JEPA loss curves aren’t meaningful to me right now. I wonder if that will change in the future.
Next step
- Notebook to code it up